
Simultaneous state and actuator fault estimation for satellite attitude control systems
2016-11-23 06:12:10ChengYaoWangRixinXuMinqiangLiYuqing
CHINESE JOURNAL OF AERONAUTICS 2016年3期
Cheng Yao,Wang Rixin,Xu Minqiang,Li Yuqing
Deep Space Exploration Research Center,Harbin Institute of Technology,Harbin 150080,China
Simultaneous state and actuator fault estimation for satellite attitude control systems
Cheng Yao,Wang Rixin*,Xu Minqiang,Li Yuqing
Deep Space Exploration Research Center,Harbin Institute of Technology,Harbin 150080,China
In this paper,a new nonlinear augmented observer is proposed and applied to satellite attitude control systems.The observer can estimate system state and actuator fault simultaneously.It can enhance the performances of rapidly-varying faults estimation.Only original system matrices are adopted in the parameter design.The considered faults can be unbounded,and the proposed augmented observer can estimate a large class of faults.Systems without disturbances and the fault whose finite times derivatives are zero piecewise are initially considered,followed by a discussion of a general situation where the system is subject to disturbances and the finite times derivatives of the faults are not null but bounded.For the considered nonlinear system,convergence conditions of the observer are provided and the stability analysis is performed using Lyapunov direct method.Then a feasible algorithm is explored to compute the observer parameters using linear matrix inequalities(LMIs).Finally,the effectiveness of the proposed approach is illustrated by considering an example of a closed-loop satellite attitude control system.The simulation results show satisfactory performance in estimating states and actuator faults.It also shows that multiple faults can be estimated successfully.
1.Introduction
A satellite attitude control system is an essential subsystem for accomplishing successful space missions.Due to the increasing requirement for high safety and reliability,fault diagnosis for satellite attitude control systems has been an importantresearch topic.Fruitful results can befound in many researches.1–3
During the last two decades,model-based fault diagnosis techniques have been widely researched and applied in modern systems.4,5Generally speaking,model-based fault diagnosis strategy performs three essential tasks:fault detection,fault isolation and fault estimation.6,7Fault estimation is the superior lever of the three tasks.Accurate fault estimation implies that it not only detects and isolates the fault automatically,but also provides details of the fault,such as the size and time varying behavior of the fault.Besides,once a fault is determined,fault tolerant control can be adopted to compensate for it,which requires a simultaneous state and fault estimation.8,9Thus,state estimation observers that can provide the required state and fault information within one design have attracted a lot of attention.

Fig.1 State estimation errors in Case 1 by different methods.
Much research effort has been devoted in this area and fruitful results have been published.To mention a few,proportional multi-integral observers were designed in Refs.10,11to achieve fault estimation for linear and nonlinear descriptor system.In Refs.12,13,actuator fault estimation based on neural network was considered.In Refs.14,15,adaptive observer technique has been used to estimate fault.In Refs.16,17,fault estimation is investigated by sliding mode observers.
Among various approaches developed in the past,the augmented observer has attracted increasing attention due to its simplicity and the potential for simultaneously estimate system states and faults.The main idea of this kind of observer lies in addressing the faults as additional state variables.Accordingly,a variety of important results have been reported in the literature.For example,the actuator fault estimation based on augmented observer has been addressed in Refs.18,19for linear time invariant systems,and in Ref.20for linear parameter varying systems.Fault diagnosis using augmented observer for rotor systems and satellite attitude control systems have been investigated in Refs.21,22and Refs.23,24,respectively.In Ref.25,a nonlinear augmented observer is designed and applied to a quadrotor aircraft.There are also much literature which can be viewed as the transformations of the augmented observers,such as Refs.26,27.However,the traditional augmented observer is conservative as the faults are assumed to be slowly-varying.In this situation,the constant fault estimation is guaranteed to be unbiased,but it fails to deal with the rapidly-varying fault.Besides,systematic and convenient approaches for the design of nonlinear augmented observers remain lacking in the available literature.
Inspired by the research problems above,in this paper,a nonlinear augmented observer is designed and applied to satellite attitude control systems.Unlike in Refs.23,24,the Takagi-Sugeno fuzzy model is used to linearise the satellite attitude dynamics or only slowly-varying fault is considered.The augmented observer proposed in this paper can handle the estimation problem for a large class of actuator faults.Moreover,no equivalent transformations are needed for obtaining this observer.Our design uses only original coefficient matrices,thus the observer is convenient and reliable in computations.
In summary,the main contributions of this paper are as follows:(1)a new nonlinear augmented observer with a novel structure is proposed to estimate states and actuator faults for satellite attitude control systems;(2)the observer parameters can be computed directly using linear matrix inequalities(LMIs)with original coefficient matrices;(3)multiple rapidly-varying faults can be estimated within one design.
The rest of this paper is organized as follows.Section 2 briefly describes problem statement.In Sections 3 and 4,the design of the augmented observers is developed in detail for two cases,respectively.Section 3 concerns with the ideal case in which the finite times derivatives of the faults is assumed to be zero piecewise.Section 4 deals with the general case that the finite times derivatives of the faults is not null but bounded and disturbances cannot be neglected.Simulations are provided in Section 5 via an example of a satellite attitude control system.Conclusions are drawn in Section 6.
Notation.The notation used in the present paper is fairly standard.Rndenotes the n-dimensional Euclidean space,and RnXmis the set of all real matrices of dimension nXm.Pgt;0 means that P is real symmetric and positive definite.||.||stands for the usual L2norm.λmax(X)and λmin(X)denote the maximum and minimum eigenvalues of X.The symmetric terms in a symmetric matrix are denoted by''*quot;.
2.Problem formulation
Consider a nonlinear dynamic system with actuator fault as

where x(t)∈Rnis the system state vector;u(t)∈Rmand y(t)∈Rpare the input and the output vectors,respectively;d(t)∈Rlis the unknown disturbance vector and it is assumed to be L2norm bounded;f(t)∈Rkis the unknown vector that represents all possible actuator faults;A,B,C,E andlare known constant real matrices of appropriate dimensions,and the pair(A,C)is observable;the nonlinear vector function Φ(x)is assumed to be Lipschitz nonlinear with a Lipschitz constant γ,i.e.,

In this paper,our goal is to develop a new augmented observer to estimate system states and fault simultaneously.And then an effective way to calculate the design parameters is given.First,Section 3 discusses an augmented observer for an ideal case in which system disturbances are neglected and f(t)is assumed to be in a general form as follows:

where Fi(i=0,1,...,q-1)are unknown constant vectors.One can see that the qth derivative of f(t)with respect to time is zero(i.e.,f(q)=0).And then,Section 4 discusses a robust augmented observer for a more general case in which the system is subjected to disturbances and f(q)is not null but bounded.One can see that the fault considered in this paper may be unbounded.
It is worth noting that the fault in the form of Eq.(3)can describe a large class of faults.26,27For instance,constant faults correspond to Eq.(3)with q=1 and ramp-wise faults correspond to Eq.(3)with q=2.Actually,since f(q)is required to be bounded in Section 4,lots of faults can be described in the form of Eq.(3)using Taylor expansion.Thus,without loss of generality,we take Eq.(3)to express the considered fault.
3.Augmented observer design:the ideal case
Consider a nonlinear dynamic system without disturbance in the following form:

Letting

and using f(q)=0,an augmented system can be constructed as

where

According to the augmented system above,the observer can be constructed as


The augmented state estimation error can be de fined asThe following main concern is to design an observer such thatthat is,andwhereandare the state estimation error and fault estimation error,respectively,withthe estimation of fault vector.
Theorem 1.For the given constant γ,if there exist matrices Pgt;0 and fsuch that the following condition holds:

then the observer in the form of Eq.(7)is asymptotically stable and the estimated error of state and fault converges exponentially to zero.
Proof.According to thesystem Eq.(6)and observer Eq.(7),the dynamics of the augmented state error can be derived as

Choose the following Lyapunov function:

The time derivative of it reads


It follows that

Thus,the augmented observer ensures that ˉe(t)→ 0 as t→∞.
On the other hand,the Lyapunov function satisfies that

Thus,one has

Substituting Eq.(15)into Eq.(17)gives

Integrating Eq. (18), one can obtainwhere

Fig.2 Faults and their estimates in Case 1 by different methods.

Fig.3 State estimation errors in Case 2 by different methods.


4.Robust augmented observer design:the general case
In this section,the general case is considered.The nonlinear dynamic system is subject to disturbances and f(q)is not zero but assumed to be bounded.
For the system given in Eq. (1), let ξi=f(i)(i=1,2,...,q-1)and define the augmented state vector as in Eq.(6),then we have an augmented system as
where
and the other symbols are the same as those defined in Eq.(6).
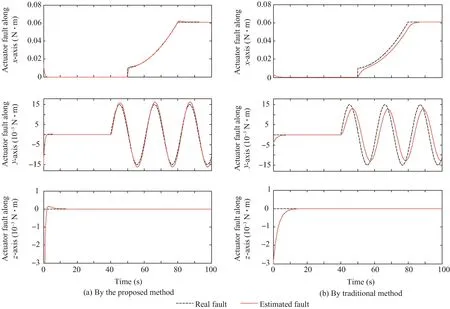
Fig.4 Faults and their estimates in Case 2 by different methods.
Theorem 2.For the given constant γ and δ,if there exist matrices Pgt;0 andfsuch that the following condition holds:then the observer in the form of Eq.(7)is robustly stable,that is,the estimated error of state and fault is uniformly bounded.
Proof.According to the observer Eq.(7)and system Eq.(20),the dynamics of the augmented state error can be derived as

Choose the following Lyapunov function:

The time derivative of it reads

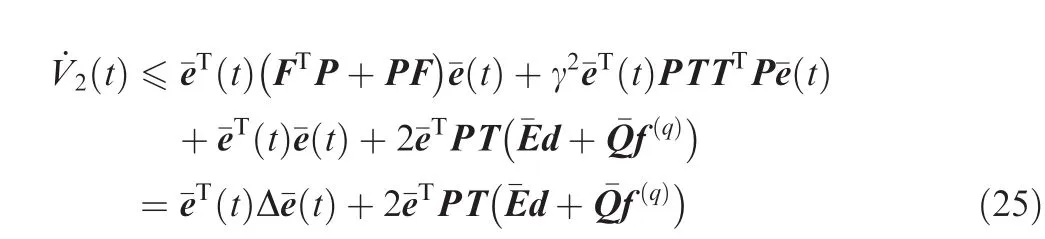
Define


Then it is clear that

Under the zero initial condition,we have

Therefore,

Remark 1.If there are no disturbances and f(q)=0,Eq.(25)reduces to Eq.(14).Since the matrix Δ is a negative matrix according to Schur Complement Lemma,one can see that it is just the result which has been addressed in the ideal case.Thus,the observer designed in the ideal case serves as a particular case of robust augmented observer design.
Remark 2.To obtain the augmented observer discussed, how to calculate the corresponding matrices F,T,G and N is an important problem.In the following section,the solution of the above theorem is achieved by transferring inequality(21)to an LMI with the required transformation.Thus,the problem can be solved easily from the standard scientific computing software.
According to Schur Complement Lemma,Ξlt;0 in inequality(21)can be rewritten into the following matrix inequality form:


This matrix inequality can be solved by using MATLAB LMI toolbox with X,Y and P as the matrix variables.Once X,Y and P are obtained,one can get N=XP-1and G=YP-1.Furthermore,T andfcan be determined by using Eqs.(8)and(9)and then the observer is obtained.
Remark 3.In order to compare the proposed method with the traditional method,a system without disturbance is considered and the fault is assumed to be in the form of Eq.(3).



However,as designed in Section 3,our proposed augmented observer can achieve an unbiased estimation of the state and the fault.Case 1 in simulation part is carried out to verify the above analysis and show the effectiveness.
5.Application
5.1.Mathematical model of satellite attitude control system
In this section,the effectiveness of the proposed estimation method is illustrated by considering a satellite attitude control system.The dynamics model with actuator faults can be given in state space formulation as Ref.28.


5.2.Simulation results
In this simulation,two fault cases are considered to illustrate the performance of the designed augmented observer.The first case concerns with the single-fault in ideal situation and the second case deals with the multiple-fault in general situation.
Case 1.Assume that x-axis actuator suffers a ramp-wise fault in the following form.That is,friction torque suddenly increases at 50 s and continued to increase.

It can be seen that the second times derivatives of the fault is zero piecewise.Therefore,a two-step augmentation(the augmented system in the form of Eq.(20)with q=2)is carried out to illustrate the performance of the proposed method.
The curves of the state estimation errors generated by the proposed method are given in Fig.1(a).In order to show that the proposed method is superior to the conventional method,a traditional augmented observer is also designed.The corresponding simulation results are given in Fig.1(b).The trajectories of the faults and their estimates are exhibited in Fig.2.It can be seen that the tracking performance is desired.From Fig.1(a),it is shown that the state estimation errors converge to zero.From Fig.2(a),one can see that the fault is estimated successfully.Therefore not only the x-axis actuator fault is detected,but also the accurate fault information is provided.It can be seen that the state estimation errors in Fig.1(b)are bounded but not converge to zero.It is not surprising,because the traditional observer serves as one-step augmented observer.This observer can only achieve the unbiased estimation for the fault whose first times derivatives is zero.The estimation performance shown in Fig.2(b)is obviously less satisfactory than that shown in Fig.2(a).
Case 2.It is supposed that the x-axis actuator and y-axis actuator are prone to faults simultaneously,and z-axis actuator is fault free.The faults are considered in the following form.Friction torque of x-axis actuator rapidly increased after 50 s and stabilized at a certain value after 80 s.Friction torque of y-axis actuator increased periodically after 40 s.

We still use the observer designed in Case 1.The curves of the state estimation errors and the estimated faults by the proposed method and traditional method are shown in Figs.3 and 4,respectively.Since the disturbances exist and the second times derivatives of the faults are not zero,the state estimation errors in Fig.3(a)are not zero but bounded.It can be seen from Fig.4(a)that the two faults are estimated satisfactorily.Therefore,both the faults of x-axis actuator and y-axis actuator are detected and identified successfully by our proposed method,which means that the designed augmented observer has the ability to diagnose multiple faults simultaneously.From Fig.3(b)and Fig.4(b),it can be seen that the two faults can also be detected and estimated,but the estimation performance is less accurate than the results of our proposed method obviously.
From the above simulation results,it can be concluded that for the ramp-wise fault in Case 1,an unbiased estimation of the fault can be achieved using our proposed method,but the traditional method can only achieve a biased estimation.As for the two rapidly-varying faults in Case 2,estimation of two simultaneous faults can be both achieved using our proposed and traditional methods,but our method can enhance the performances of rapidly-varying faults estimation.Thus,our proposed augmented observer outperforms the traditional augmented observer.
6.Conclusions
(1)In this paper,an augmented observer is presented to simultaneously estimate the states and actuator faults for nonlinear Lipschitz systems.Both of an ideal case and a more general case are considered with detailed theoretical analyses.The design of the observer only adopts the original coefficient matrices.Based on LMIs techniques,the observer parameters are conveniently computed.Compared with the conventional method,the proposed augmented observer can improve the performances of fault estimation.The effectiveness is illustrated by a satellite attitude control system.It is shown that not only single fault but also multiple rapidly varying faults can be estimated successfully.
(2)Further research work includes two aspects.The first one is that although the robust nonlinear augmented observer is designed in this paper,disturbances should be further tackled using perfect or approximate decoupling strategy.Since only dynamics model of satellite attitude is considered,extension of the system model by adding kinemics model has more research significance,which should be investigated to further verify the proposed method.
Acknowledgements
This work was supported by the National Basic Research Program of China(No.2012CB720003)and the National Natural Science Foundation of China(No.61203151).
1.Gao CY,Zhao Q,Duan GR.Robust actuator fault diagnosis scheme for satellite attitude control systems.J Franklin Inst 2013;350(9):2560–80.
2.Zhang J,Swain AK,Nguang SK.Robust sensor fault estimation scheme for satellite attitude control systems.J Franklin Inst 2013;350(9):2581–604.
3.Pirmoradi FN,Sassani F,de Silva CW.Fault detection and diagnosis in a spacecraft attitude determination system.Acta Astronaut 2009;65(5):710–29.
4.Niu EZ,Wang Q,Dong CY.Robust fault detection and optimization for a network of unmanned vehicles with imperfect communication channels.Chin J Aeronaut 2014;27(1):65–75.
5.Wang ZL,Wang Q,Dong CY,Gong LG.Closed-loop fault detection for full-envelope flight vehicle with measurement delays.Chin J Aeronaut 2015;28(3):832–44.
6.Ding SX. Model-based fault diagnosis techniques. New York:Springer;2012.p.3–11.
7.Marzat J,Piet-Lahanier H,Damongeot F,Walter E.Model-based fault diagnosis for aerospace systems:a survey.Proc Inst Mech Eng,Part G:J Aerosp Eng 2012;226(10):1329–60.
8.Xiao B,Hu Q,Singhose W,Huo X.Reaction wheel fault compensation and disturbance rejection for spacecraft attitude tracking.J Guid Control Dyn 2013;36(6):1565–75.
9.Zhong L,Fe′lix M-C.A two-stage approach for managing actuators redundancy and its application to fault tolerant flight control.Chin J Aeronaut 2015;28(2):469–77.
10.Gao ZW,Ding SX.Fault estimation and fault-tolerant control for descriptor systems via proportional,multiple-integral and derivative observer design.IET Control Theory Appl 2007;1(5):1208–18.
11.Gao ZW,Ding SX.Actuator fault robust estimation and faulttolerant control for a class of nonlinear descriptor systems.Automatica 2007;43(5):912–20.
12.Talebi HA,Khorasani K.A neural network-based multiplicative actuator fault detection and isolation of nonlinear systems.IEEE Trans Control Syst Technol 2013;21(3):842–51.
13.Wang ZH,Shen Y,Zhang XL.Actuator fault estimation for a class of nonlinear descriptor systems.Int J Syst Sci 2014;45(3):487–96.
14.Zhang K,Jiang B,Cocquempot V.Adaptive observer-based fast fault estimation.Int J Control Autom Syst 2008;6(3):320–6.
15.Shahriari-kahkeshi M,Sheikholeslam F,Askari J.Adaptive fault detection and estimation scheme for a class of uncertain nonlinear systems.Nonlinear Dyn 2015;79(4):2623–37.
16.Alwi H,Edwards C,Tan CP.Sliding mode estimation schemes for incipient sensor faults.Automatica 2009;45(7):1679–85.
17.Menon PP,Edwards C.A sliding mode observer for monitoring and fault estimation in a network of dynamical systems.Int J Robust Nonlinear Control 2014;24(17):2669–85.
18.Shi F,Patton RJ.Simultaneous state and fault estimation for descriptor systems using an augmented PD observer.Proceedings of the 19th IFAC world congress;2014 Aug 24–29;Cape Town,South Africa.Heidelberg:IFAC;2014.p.8006–11.
19.Patton RJ,Klinkhieo S.Actuator fault estimation and compensation based on an augmented state observer approach.Proceedings of the 48h IEEE conference on decision and control;2009 Dec 16–18;Shanghai,China.Piscataway(NJ):IEEE Press;2009.p.8482–7.
20.Wang ZH,Mickael R,Didier T,Shen Y.Actuator fault estimation observer design for discrete-time linear parameter-varying descriptor systems.Int J Adapt Control Signal Process 2015;29(2):242–58.
21.Wang Z,Schittenhelm RS,Borsdorf M,Rinderknecht S.Application of augmented observer for fault diagnosis in rotor systems.Eng Lett 2013;21(1):10–7.
22.Wang Z,Schittenhelm RS,Rinderknecht S.Design of augmented observer for rotor systems.In:Kim HK,Ao SI,Amouzegar MA,Rieger BB,editors.IAENG transactions on engineering technologies.New York:Springer,Netherlands;2014.p.67–82.
23.Challoo R,Dubey S.Simultaneous state and actuator fault estimation with fuzzy descriptor PMID and PD observers for satellite control systems.Int J Robot Autom 2011;2(5):344–59.
24.Wang ZH,Shen Y,Zhang XL.Augmented observer-based actuator fault diagnosis for nonlinear systems.J Astronaut 2012;33(12):1742–6[Chinese].
25.Wang XH,Shirinzadeh B.Nonlinear augmented observer design and application to quadrotor aircraft.Nonlinear Dyn 2015;80(3):1463–81.
26.Gao ZW,Ho DW.State/noise estimator for descriptor systems with application to sensor fault diagnosis.IEEE Trans Signal Process 2006;54(4):1316–26.
27.Koenig D.Unknown input proportional multiple-integral observer design for linear descriptor systems:application to state and fault estimation.IEEE Trans Autom Control 2005;50(2):212–7.
28.Wang RX,Cheng Y,Xu MQ.Analytical redundancy based fault diagnosis scheme for satellite attitude control systems.J Franklin Inst 2015;352(5):1906–31.
Cheng Yaoreceived the M.E.degree in general and fundamental mechanics from Harbin Institute of Technology,Harbin,China,in 2012,where he is currently working toward the Ph.D.degree in the Deep Space Exploration Research Center.His current research interests include fault diagnosis for dynamical systems,soft-computing methods and qualitative reasoning.
Wang Rixinis an associate professor with Harbin Institute of Technology.His research interests include fault detection and diagnosis for machinery and spacecraft.
Xu Minqiangis a professor with Harbin Institute of Technology.His research interests include machinery and spacecraft fault diagnosis,signal processing and space debris modeling.
Li Yuqingis an instructor with Harbin Institute of Technology.His main research interests are planning and scheduling,satellite range scheduling,and autonomous spacecraft.
21 August 2015;revised 10 December 2015;accepted 7 January 2016
Available online 10 May 2016
Actuator fault estimation;
Augmented state observer;
Fault diagnosis;
Lipschitz nonlinear system;
Satellite attitude control
system
?2016 Chinese Society of Aeronautics and Astronautics.Production and hosting by Elsevier Ltd.This is an open access article under the CCBY-NC-ND license(http://creativecommons.org/licenses/by-nc-nd/4.0/).
*Corresponding author.Tel.:+86 451 86418320.
E-mail address:wangrx@hit.edu.cn(R.Wang).
Peer review under responsibility of Editorial Committee of CJA.
 CHINESE JOURNAL OF AERONAUTICS2016年3期
CHINESE JOURNAL OF AERONAUTICS2016年3期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Optimization on cooperative feed strategy for radial–axial ring rolling process of Inco718 alloy by RSM and FEM
- Prediction of cutting forces in ball-end milling of 2.5D C/C composites
- Performance optimization of grooved slippers for aero hydraulic pumps
- Modeling of reliability and performance assessment of a dissimilar redundancy actuation system with failure monitoring
- Motion synchronization in a dual redundant HA/EHA system by using a hybrid integrated intelligent control design
- Remaining useful life prediction based on the Wiener process for an aviation axial piston pump